Dvij Kalaria | द्विज कलारिया | દ્વિજ કલારિયા
I am a second-year EECS PhD student at UC Berkeley in EMBER Center affiliated with Berkeley AI Research (BAIR) advised by Prof. Shankar Sastry. I will join as an intern in NVIDIA GEAR Lab supervised by Prof. Yuke Zhu and Dr. Jim Fan from May 2026.
Previously I was a Masters in Robotics student at CMU DRIVE lab and LeCAR lab, working with Prof. John M. Dolan, Prof. Qin Lin and Prof. Guanya Shi. I did my bachelors in Computer Science from IIT Kharagpur. For my undergraduate thesis, I was co-advised by Prof. Partha Pratim Chakrabarti and Prof. Aritra Hazra
Broadly, I am interested in Agile robots 🦾 🦿 🏎️ that operate at their limits and can rapidly adapt to unknown scenarios including collaborating with humans/other robots. Currently, I am focused on using human demonstrations to enable humanoid robots to play agile sports like Ping Pong, and do whole body everyday tasks like loading/unloading dishwasher to assist humans.
From 2022 to 2024, I led vehicle dynamics team of AI Racing Tech 🏎️, a multi-million $ autonomous collaborative racing team between UC Berkeley, CMU and UCSD. I have deployed real-world robot learning on F1-level autonomous race car at 160 MPH.
Apart from research, I love developing games in Unity. I also love trekking and playing all racquet sports: Tennis, Badminton, Squash, Ping Pong. Some high altitude treks I have completed: Brahmatal, Dayara Bugyal in the Himalayan ranges. I hail from India’s first recognized UNESCO World Heritage City, Ahmedabad ![]()
![]()
![]()
![]()
![]()

![]()
I am activately looking for undergrads and master students to work on research projects in vision-language action models for humanoids robots and table-tennis playing robots at the EMBER Center. We are also open to hosting visiting students.
🔥 Latest
[09/2025, General Robotics] 🎉 DreamControl got accepted to ICRA 2026. Follow the twitter/X release here
[06/2025, General Robotics] I started my 3-month internship at General Robotics
[06/2025, IROS] 🎉 One paper (RES-DOB-CBF) accepted at IROS 2025.
[02/2025, L4DC] 🎉 One paper (α-RACER) accepted at L4DC 2025. Follow the twitter/X release here
[02/2025, CVPR] 🎉 One paper (LATTE-MV) accepted at CVPR 2025. Follow the twiiter/X release here
[01/2025, ICRA] 🎉 Two papers (AnyCar and MetaAgileControl) accepted at ICRA 2025. Follow the twitter/X release of AnyCar here
[08/2024, UCB] 🎓 I joined UC Berkeley EECS PhD program (AI Robotics).
[06/2024, CMU] (thesis | presentation) Master thesis talk on “Safe, Robust and Adaptive Model-based Learning for Agile Robots: Autonomous Racing“.
🔬 Research
Broadly, I am interested in building general purpose robots that can interact safely with humans and can adapt to unknown scenarios. Currently, my research interests are in:
- Using human demonstrations to guide humanoids to do everyday long-horizon whole-body tasks like cooking, organizing etc. and play robotic ping pong
- Marrying game theory with robotics enabling use of classical game theoretic approaches to analyze Nash-equilibrium in multi-agent collaboration with robots and humans
- Enabling safe, robust and adaptive control for agile systems in unknown environments
DreamControl: Human-Inspired Whole-Body Humanoid Control for Scene Interaction via Guided Diffusion
Dvij Kalaria, Sudarshan Harithas, Pushkal Katara, Sangkyung Kwak, Sarthak Bhagat, S. Shankar Sastry, Srinath Sridhar, Sai Vemprala, Ashish Kapoor, Jonathan Huang
ICRA 2026
website | code | arxiv | social media (X)![]() DreamControl: Uses generative model trained on offline human motion data to generate human motion trajectories for performing varied tasks. These trajectories are retargeterd to unitree G1 robot and closed-loop task-specific RL policy is trained that can be deployed in sim and some real tasks.
DreamControl: Uses generative model trained on offline human motion data to generate human motion trajectories for performing varied tasks. These trajectories are retargeterd to unitree G1 robot and closed-loop task-specific RL policy is trained that can be deployed in sim and some real tasks.
α-RACER: Real-Time Algorithm for Game-Theoretic Motion Planning and Control in Autonomous Racing using Near-Potential Function
Dvij Kalaria*, Chinmay Maheshwari*, Shankar Sastry
L4DC 2025
website | code | arxiv | social media (X)![]() α-RACER: Formulates multi-car racing as an alpha-potential game that learns a potential function for parameterized set of policies offline. The potential function is optimized online to approximate Nash equilibrium in real-time.
α-RACER: Formulates multi-car racing as an alpha-potential game that learns a potential function for parameterized set of policies offline. The potential function is optimized online to approximate Nash equilibrium in real-time.
LATTE-MV: Learning to Anticipate Table Tennis Hits from Monocular Videos
Daniel Etaat, Dvij Kalaria, Nima Rahmanian, Shankar Sastry
CVPR 2025
website | code | arxiv | dataset | social media (X) ![]() LATTE-MV: A scalable system for reconstructing monocular videos of table tennis matches in 3D. This data is used to train a large transformer capable of anticipating opponent actions through conformal prediction. Reconstructed trajectories are simulated in MuJoCo with a robotic system on receiving end capable of returning balls with 59.0% accuracy as compared to 49.9% with no anticipation
LATTE-MV: A scalable system for reconstructing monocular videos of table tennis matches in 3D. This data is used to train a large transformer capable of anticipating opponent actions through conformal prediction. Reconstructed trajectories are simulated in MuJoCo with a robotic system on receiving end capable of returning balls with 59.0% accuracy as compared to 49.9% with no anticipation
Agile Mobility with Rapid Online Adaptation via Meta-learning and Uncertainty-aware MPPI
Dvij Kalaria, Wenli Xiao, Haoru Xue, Tony Tao, John M. Dolan, Guanya Shi
ICRA 2025
website | code | arxiv | video![]() MetaAgileControl: Learning a meta-adaptive model that can quickly adapt to control any car🏎️ 🚗 🚙 🛻 🚚 with any model parameters
MetaAgileControl: Learning a meta-adaptive model that can quickly adapt to control any car🏎️ 🚗 🚙 🛻 🚚 with any model parameters
Disturbance Observer-based Control Barrier Functions with Residual Model Learning for Safe Reinforcement Learning
Dvij Kalaria, Qin Lin, John M. Dolan
IROS 2025
website | code | arxiv | video![]() RES-DOB-CBF: Proposes using Residual model learning (RES) and Disturbance Observer (DOB) based Control Barrier Function (CBF) to filter unsafe actions enabling deploying safe Reinforcement Learning (RL) on real systems that does not interfere much with learning and is robust to sensor noises and model errors
RES-DOB-CBF: Proposes using Residual model learning (RES) and Disturbance Observer (DOB) based Control Barrier Function (CBF) to filter unsafe actions enabling deploying safe Reinforcement Learning (RL) on real systems that does not interfere much with learning and is robust to sensor noises and model errors

AnyCar to Anywhere: Learning Universal Dynamics Model for Agile and Adaptive Mobility
Wenli Xiao*, Haoru Xue*, Tony Tao, Dvij Kalaria, John M. Dolan, Guanya Shi
ICRA 2025
website | code | arxiv | video | social media (X) | IEEE Spectrum![]() AnyCar 🏎️ 🚗 🚙 🛻 🚚: a generalist dynamics model 🌎 built with transformer + large-scale sim pre-training + small-scale real fine-tuning. Achieves agile and adaptive control on a family of wheeled embodiments (few or zero shot) and outperforms specialist policies.
AnyCar 🏎️ 🚗 🚙 🛻 🚚: a generalist dynamics model 🌎 built with transformer + large-scale sim pre-training + small-scale real fine-tuning. Achieves agile and adaptive control on a family of wheeled embodiments (few or zero shot) and outperforms specialist policies.
Adaptive Planning and Control with Time-Varying Tire Models for Autonomous Racing Using Extreme Learning Machine
Dvij Kalaria, Qin Lin, John M. Dolan
ICRA 2024
website | code | arxiv | video | social media![]() APACRace: Use MPC + residual model learning + adjust racing line online for autonomous racing
APACRace: Use MPC + residual model learning + adjust racing line online for autonomous racing

Delay-aware Robust Control for Safe Autonomous Driving and Racing
Dvij Kalaria, Qin Lin, John M. Dolan
IEEE-IV 2023 + T-ITS Journal (Extended version)
Oral (10% of accepted papers)
![]() Proposes a Delay-aware robust tube MPC that compensates for computation delay, actuation delay and actuator dynamic delay when deploying controller on a real system. Test for autonomous driving and racing scenarios in sim and hardware
Proposes a Delay-aware robust tube MPC that compensates for computation delay, actuation delay and actuator dynamic delay when deploying controller on a real system. Test for autonomous driving and racing scenarios in sim and hardware

WROOM: An Autonomous Driving Approach for Off-Road Navigation
Dvij Kalaria*, Shreya Sharma, Sarthak Bhagat, Haoru Xue, John M. Dolan
ICRA 2024 Workshop
website | code | arxiv | news![]() WROOM brings a gym environment for training off-road driving RL policy. We use PPO + CBF to train an end-to-end agent to safely navigate in the real world.
WROOM brings a gym environment for training off-road driving RL policy. We use PPO + CBF to train an end-to-end agent to safely navigate in the real world.
Towards Safety Assured End-to-End Vision-Based Control for Autonomous Racing
Dvij Kalaria, Qin Lin, John M. Dolan
IFAC world congress 2023
code | arxiv | video | social media![]() Decoupled learning for safety and optimality for DAgger through Control Barrier Function (CBF) leads to better data-efficiency. Demonstrated for autonomous racing on sim and hardware
Decoupled learning for safety and optimality for DAgger through Control Barrier Function (CBF) leads to better data-efficiency. Demonstrated for autonomous racing on sim and hardware
Online Adaptive Compensation for Model Uncertainty Using Extreme Learning Machine-based Control Barrier Functions
Emanuel Munoz, Dvij Kalaria, Qin Lin, John M. Dolan
IROS 2022
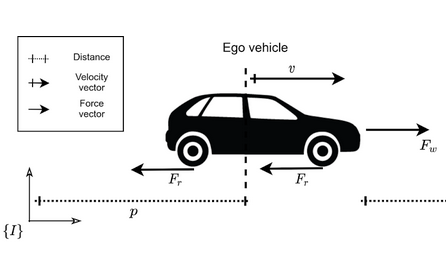
![]() Using Online Sequential Extreme Machine Learning for real-time uncertainty correction in the Adaptive Cruise Control problem.
Using Online Sequential Extreme Machine Learning for real-time uncertainty correction in the Adaptive Cruise Control problem.
Local NMPC on Global Optimised Path for Autonomous Racing
Dvij Kalaria, Parv Maheshwari, Animesh Jha, Arnesh Kumar Issar, Debashish Chakravarty, Sohel Anwar, Andres Tovar
ICRA 2021 workshop
🎓 Education

UC Berkeley EECS
PhD (AI Robotics)
2024 – Present
Prof. Shankar Sastry

CMU Robotics Institute
MS in Robotics
2022 – 2024, Grade: 4.08/4
Prof. John Dolan, Qin Lin, Guanya Shi
IIT Kharagpur
B.Tech (Hons) in Computer Science and Engineering
2018 – 2022, Grade: 9.16/10
🏆 Awards & Honors
- [2024] UC Berkeley EECS department scholarship recipient
- [2023] 3rd Place, Indy Autonomous Challenge at Las Vegas CES
- [2022] 2rd Place, Indy Autonomous Challenge at Texas Motor Speedway
- [2022] Nominee for best B.Tech thesis, IIT Kharagpur
- [2022] Solo gold, Bosch InterIIT tech
- [2021] Part of the JOSAA 2021 committee (Conducts largest pan India entrance exam, JEE with 1.2 million candidates)
- [2018] JEE Advanced, All India Rank 245 (Top 0.1%), Indian Institute of Technology (IITs)
- [2018] JEE Mains, All India Rank 393 (Top 0.01%) Central Board For Secondary Education (CBSE), 2018